1.簡介
這塊micro:bit 的馬達功能擴充板( microbit motor extension, JR801),主要提供8個伺服馬達的接口(可同時驅動)與2組DC馬達接口, 如有步進馬達的需求時, 也可將DC接口轉為步進馬達,同時此塊擴充板將常用的IO接點(P0 、 P1 、 P2等)拉出,如此即可滿足大部分使用者的馬達+一般IO應用 。
2.技術功能
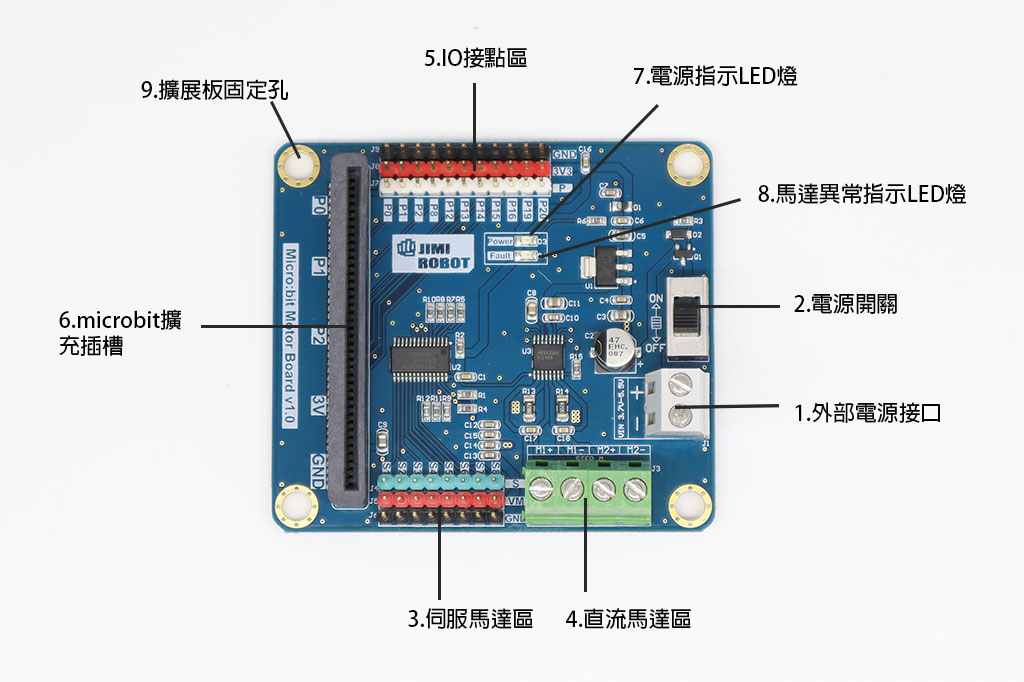
1.外部電源接口: 直流電源範圍DC 3.7V ~5.5V, 提供電源防逆接保護機制。
2.電源開關:ON方向為電源開啟, OFF方向為電源關閉。
3.伺服馬達區:8組servo馬達接口,S1-S8
- 綠色腳位:伺服馬達PWM訊號
- 紅色腳位:伺服馬達電源(VM=外部電源電壓)
- 黑色腳位:接地GND
4.直流馬達區:2組DC馬達接口M1與M2(共用1組伺服馬達), 分別為M1+&M1與M2+&M2-, 此處的電流在Hardware設計預設限制每組1A, 如需加大可以自行更換限流電阻R13&R14。
5.IO接點區: 提供micro:bit金手指基本預留IO延伸至排針,方便使用者進行使用,包含P0 P1 P2 P8 P12 P13 P14 P15 P16 P19 P20。 (P19&P20為micro:bit 保留給i2c 通訊協定使用)
- 白色腳位:micro:bit IO腳位
- 紅色腳位:3.3V系統電源
- 黑色腳位:接地GND
6.micro:bit 擴充插槽: micro:bit控制板以LED顯示面朝擴充板外側方向插入,方向如插錯功能將無反應。
7.電源指示LED: 當外部電源接入後, 開啟電源開關, LED將亮起(綠光)。
8.馬達異常指示LED: 如果馬達電路發生異常, 如電壓過低,或過電流等, 馬達異常LED將恆亮(黃光)。
9.擴展板固定孔:四個孔位皆與樂高相容,方便使用者結合樂高積木,做出更豐富的變化。
3.安裝步驟說明
1.確認 microbit motor extension board 電源開關是否關閉 。
2.安裝micro:bit 主控制板,並接上電源, 確認輸入電壓為3.7V-5.5V範圍 。

3. 開啟電源 , 確認LED電源指示燈亮起 。

4.擴展makecode積木安裝
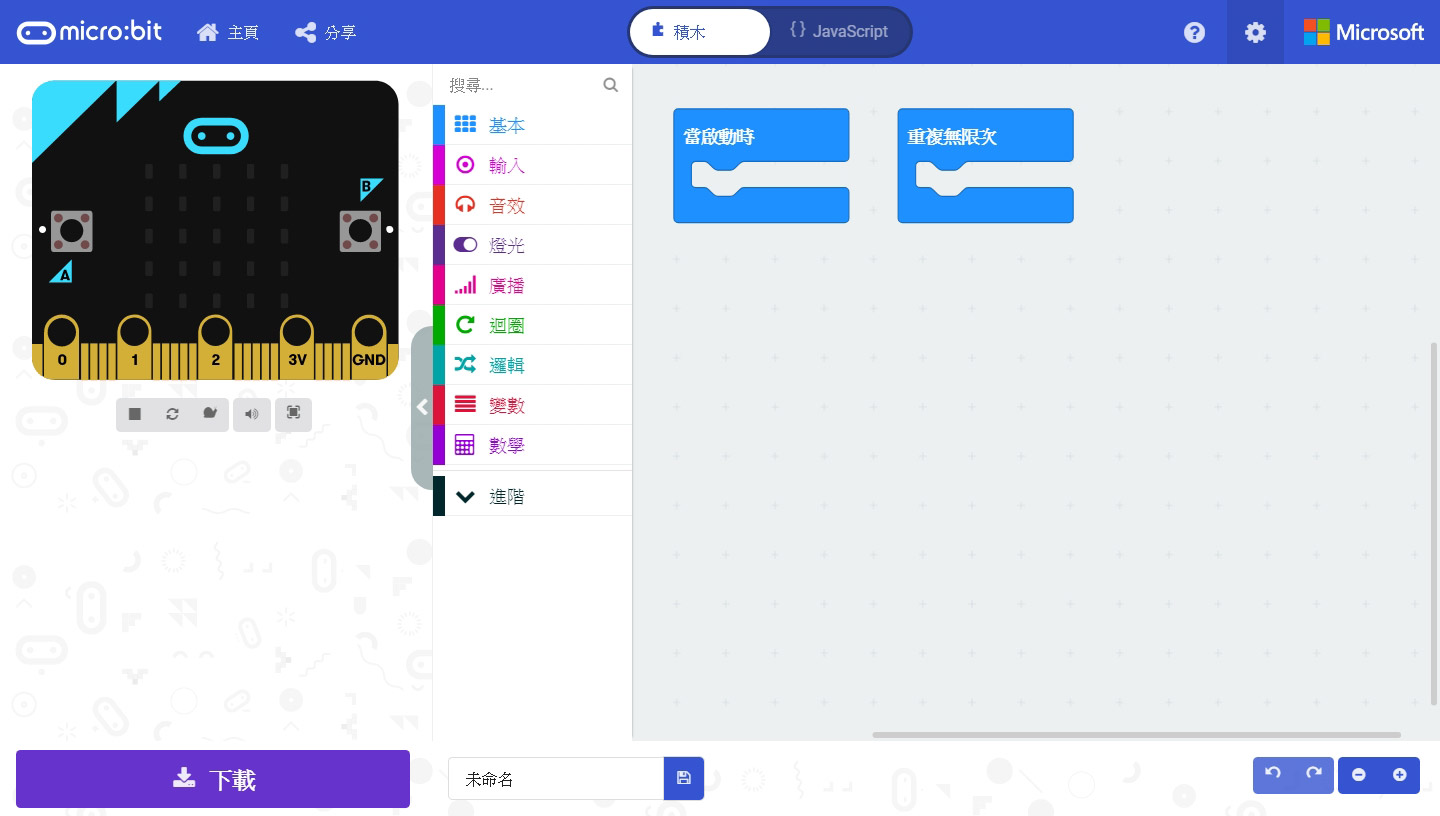
1.開啟makecode 主程式,並開啟新程式畫面。
2.點選右上角擴展功能 ,並輸入下列網址: https://github.com/jimirobot/jr801motor
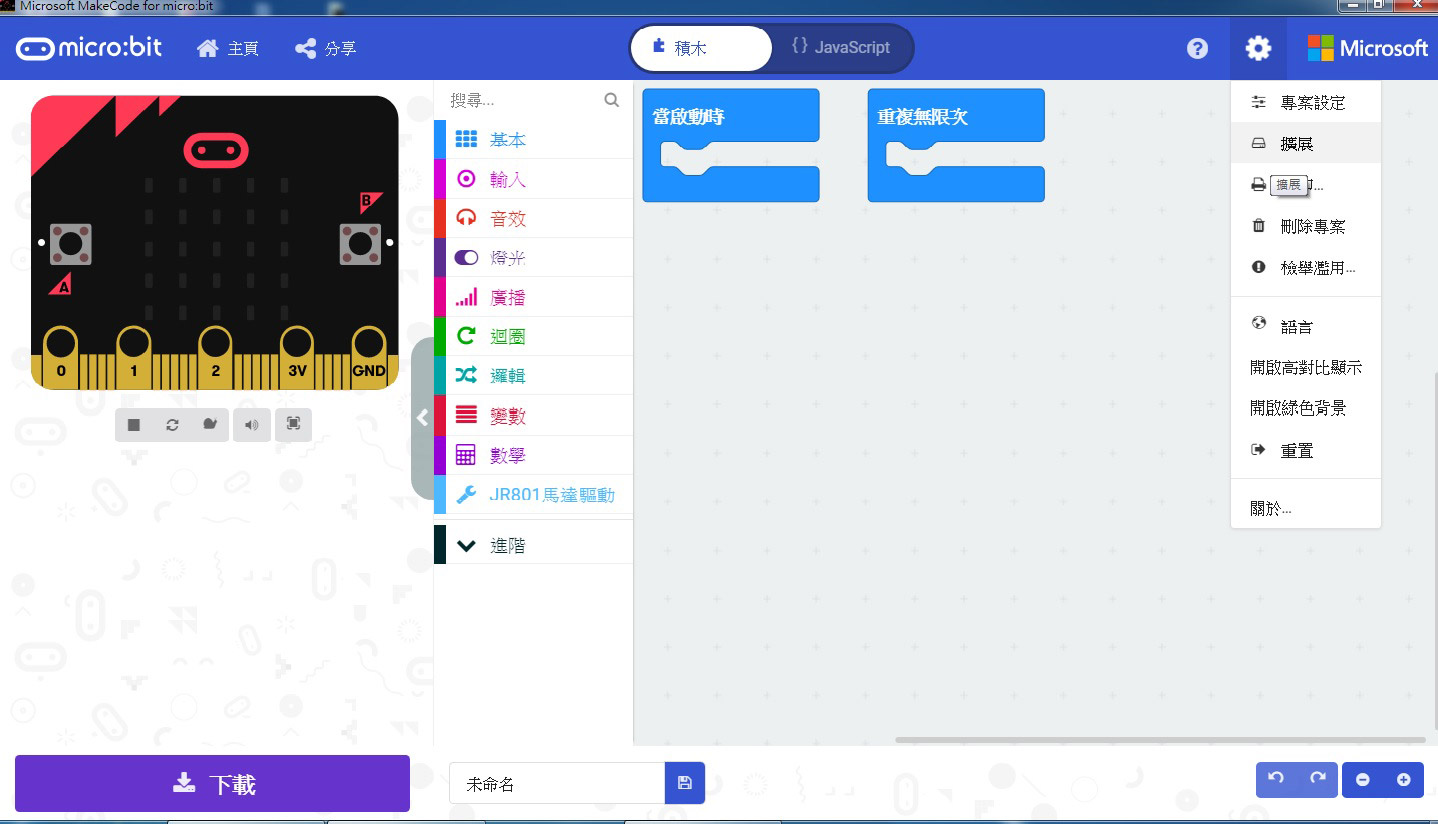
3.點選安裝 。
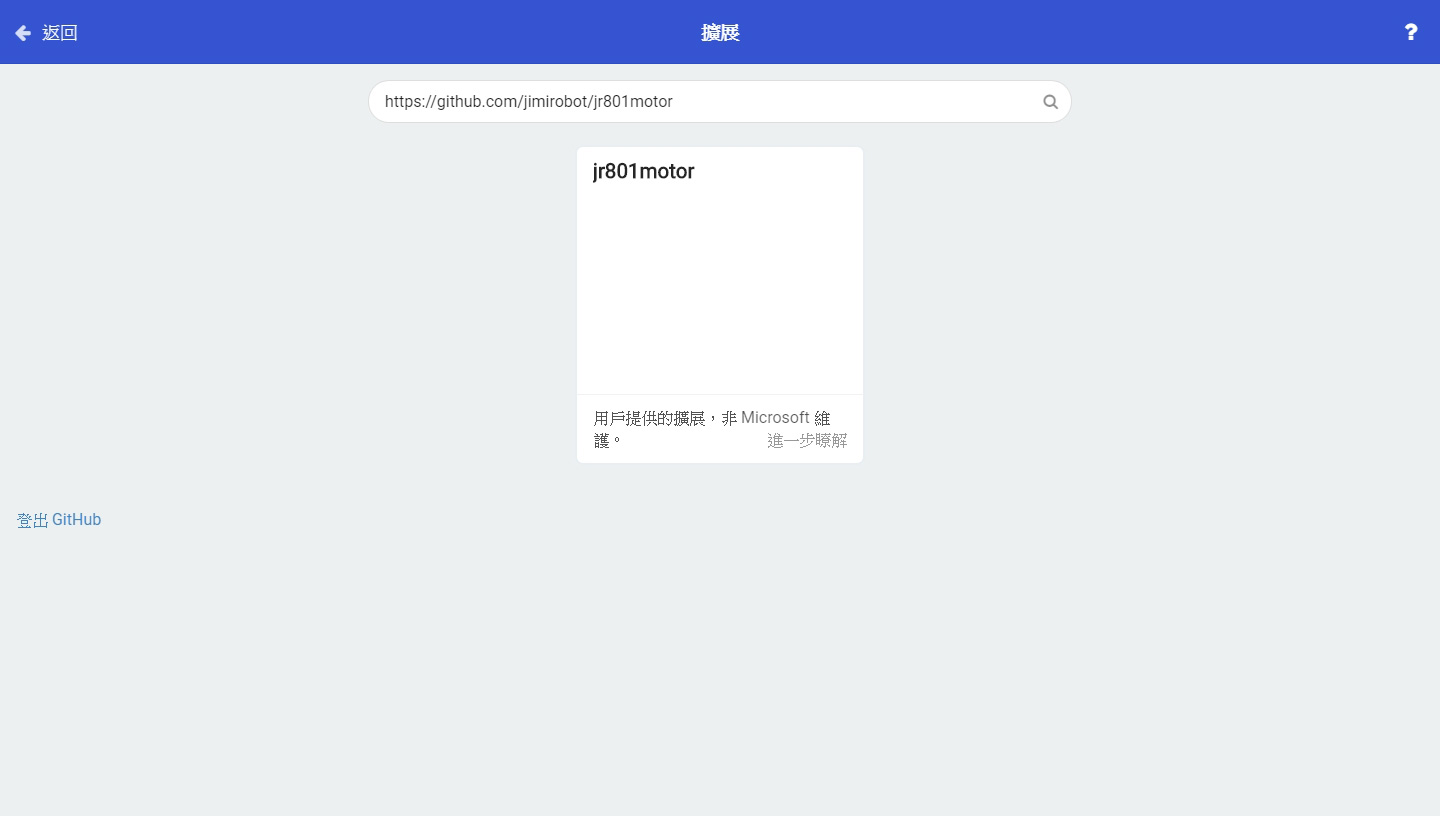
4.畫面將出現JR801馬達驅動積木方塊,即可開始使用 。

5.JR801馬達擴充積木說明
1.初始化PCA9685 
由於此塊擴展版整合了常見的pca9685 16 Channel的PWM驅動器,建議有需要用到其他馬達擴展時,先將此積木放入{當啟動時}內,確保各項參數設定正確。(備註:初始化後,PWM完整周期將會設定為20ms)
2.設定LED佔空比[S1-S8] Duty[0-100] 
此擴充版8個Channel (S1-S8), 每個Channel皆可單獨設定佔空比(PWM Duty Cycle), 設定值由0% ~100%, 0%為該channel關閉(Always Low), 100%為該channel全開(Always High)。
3.設定伺服馬達[Servo1-Servo8]角度[0-180] 
此方塊以一般伺服馬達控制pwm訊號為基礎, 待使用者選定SERVO1 – SERVO8後, 角度可設定範圍為0-180度。
4.設定DC馬達[M1|M2] 方向[FORWARD|RESERVE] 速度[0-4095] 
如需使用DC馬達時, 將馬達兩端接到擴展板的M1(M1+&M1-)或M2(M2+&M2-) ;方向設定為正轉或反轉;速度設定值為0-4095, 0 為停止,4095為全速運轉,可依實際狀況進行參數調配。
5.停止DC馬達[M1|M2] 
此積木使用時,可立刻設定DC馬達停止。
6.停止所有DC馬達 
此積木使用時,可立刻設定所有DC馬達停止 。
7.設定步進馬達角度[0-360]方向[FORWARD/RESERVE] 
如馬達連接器設定為步進馬達時(利用M1+/M1-/M2+/M2-),即可以使用這積木,此積木以Biopolar Stepper做為控制基礎,一個Step=1.8度, 使用者僅須設定想要行走的角度與方向, 步進馬達即可動作。(注意: 此方塊以Polling方式撰寫, 所以程式會根據行走角度大小, 程式運行時間也會隨之變化)
8.設定步進馬達圈數[]方向[FORWARD/RESERVE] 
使用者可以利用此積木方塊,待連接Biopolar Stepper後, 直接填入步進馬達圈數(一圈360度)與方向, 馬達即開始進行動作 。 (注意: 此方塊以Polling方式撰寫, 所以程式會根據行走角度大小, 程式運行時間也會隨之變化)
***********************************************************************
如果各位朋友有興趣購買此擴充板來試試,可以到Jimi哥的賣場捧場一下! 😀 ,裡面的商品全部都是Jimi哥團隊自行設計,台灣製造,使用上如果有甚麼問題,也歡迎彼此技術交流~