這篇這主要來講講我們 ESP32 這個模組在一開始在使用上需要注意的地方,最重要的就是ESP32 IO 的限制啦!有些腳位在我們做實驗時,最好事先避開或著事先了解,可以少走一些冤枉路,不管是你日後要使用官方的SDK、Arduino IDE或者是接下來要分享的micropython的平台,都是很有用的,所以這篇推薦大家一定要了解一下!
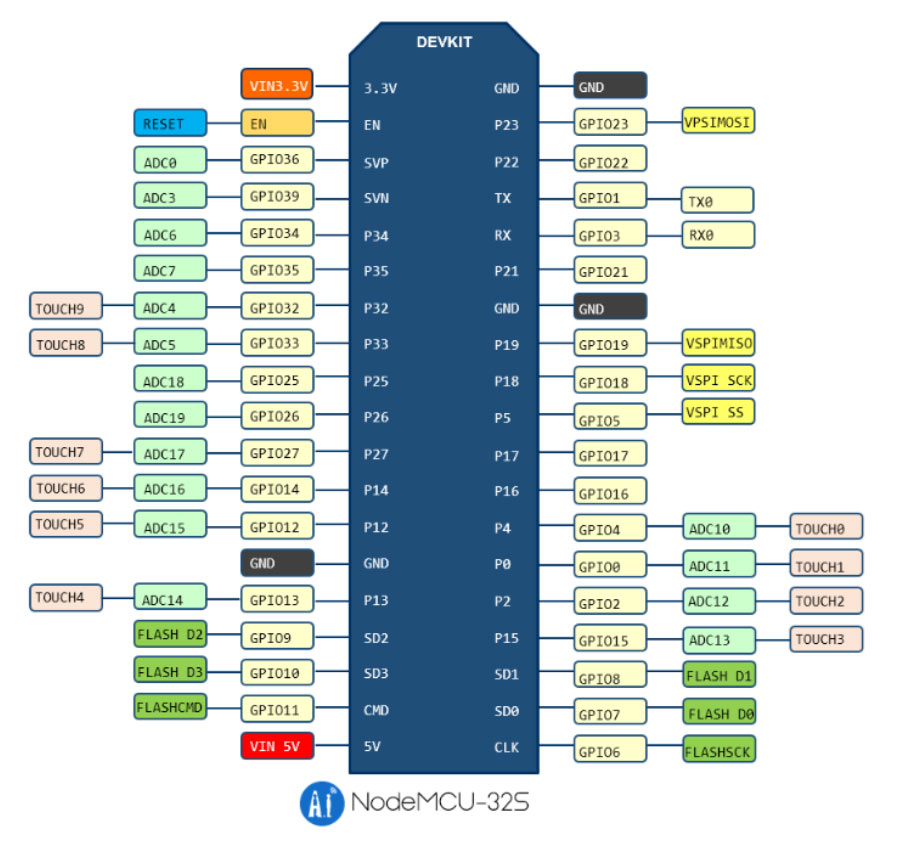
1. ESP32 IO 腳位
不能無腦 的選擇(不然會有悲劇
2. IO 規劃重點事項
下面有一些關於IO規劃的重點與大家分享:(必讀!!)
- GPIO6.7.8.9.10.11:這些是不可以使用的,因為這些腳位預設是給ESP32內部的記憶體使用的。
- GPIO0:決定開機時所需要設定的模式,有正常啟動跟uart download模式,通常這隻腳都會接到一顆按鈕來決定開始時進入哪種模式,建議不要使用。
- GPIO2:預設有接到1顆LED,如果要進入uart download模式的話,此腳位比必須floating或驅動到GND,建議可以跳過不要使用,或單純利用內建LED電路操作即可。
- GPIO1 & 3 : 是模組預設的UART通訊TX/RX,建議在腳位規劃時跳過這兩支,這兩支腳位在nodemcu板內部已經接到usb-ttl晶片,除了可以初期顯示資訊外,因為micropython底層預設也是透過uart來建立所謂的REFL(Read-Eval-Print Loop)模式,如果使用的話,可能會有顯示或鍵盤輸入異常。
- GPIO12 & GPIO15:與bootloader模式與flash有關,內部分別預設有pull-down 和pull-high電阻,使用上須注意,特別是GPIO12關係到FLASH的內部電壓值,建議不要使用。
- GPIO 34.35.36.39:這幾隻只有Input Only,所以不要設定成output模式。
- GPIO5:與SDIO Slave模式有關,如果有需要使用到這界面,請注意使用。
以上就是基本上需要注意的地方,為方便使用,整理成下面表格參考。
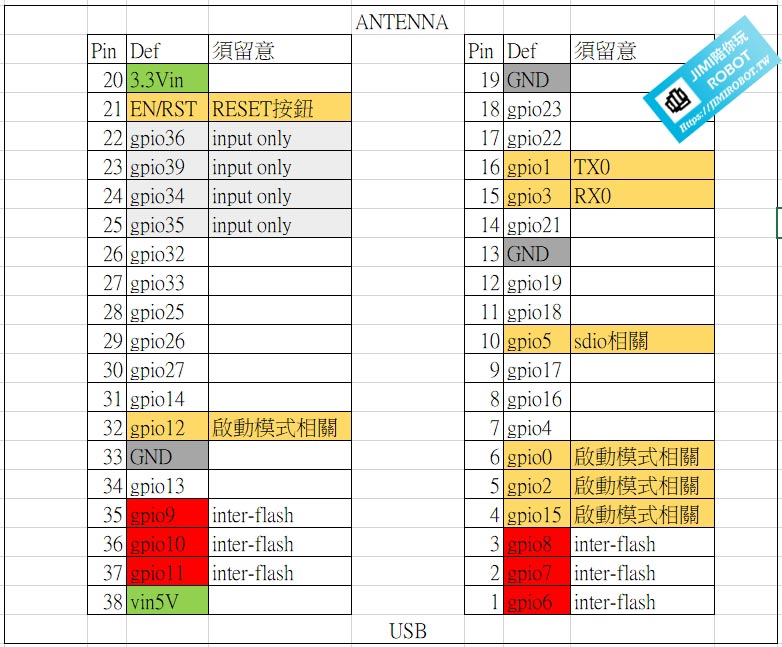
紅色方塊為不要使用,橘色為須特別注意使用細節,綠色為電源腳,灰色為GND,所以大家可以搭配這張表格與nodemcu 32s的腳位對照圖,在進行實驗腳位規劃時,可以在注意一下,應該就不會遇到一些怪異問題。
↓↓↓↓↓↓賣場連結↓↓↓↓↓↓
歡迎大家有需要的話,可以多多支持一下我們的蝦皮賣場喔! 😀
吉米家官方店-創客機器人材料專賣 https://shopee.tw/jimirobot.tw
Follow JIMI哥 Twitter : https://twitter.com/jimirobot <–得到最新文章通知