Neopixel 是很多 maker 愛用的 RGB 七彩燈條,不管在 arduino、microbit 或數莓派的平台上,都有廣泛的應用,甚至可以輕易找到對應的函示庫應用,這篇來聊聊 NeoPixel RGB 燈條原理與在 ESP32 平台上怎麼使用。
1. NeoPixel RGB 燈條原理
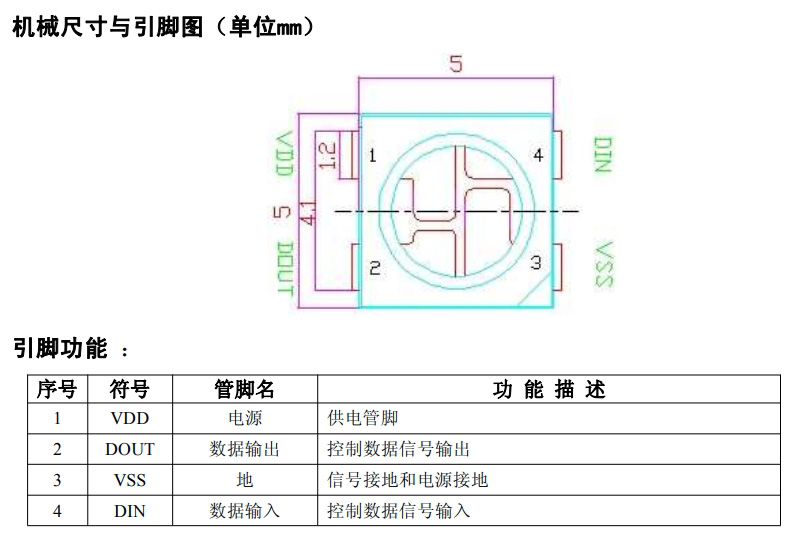
由上圖來看,除了剛剛提到的 VDD VSS DIN 三隻腳外,還有一支 DOUT 腳位,各位朋友可能會好奇這是做什麼的?JIMI 哥先來講一下傳統 LED 在多顆應用上的缺點,以前 LED 如果一次要使用多顆且需單獨獨立控制時,在每顆 LED 就會有一支控制腳位來進行控制,這樣的結果就會導致在電路上的佈局繁瑣,10 顆LED就需要 10 條控制線路,100 顆豈不是要 100 條?所以 DOUT 這個腳位就是被設計用來『串接』多顆 LED 用途。下面就是多顆 2812 LED 串接的典型連接圖:
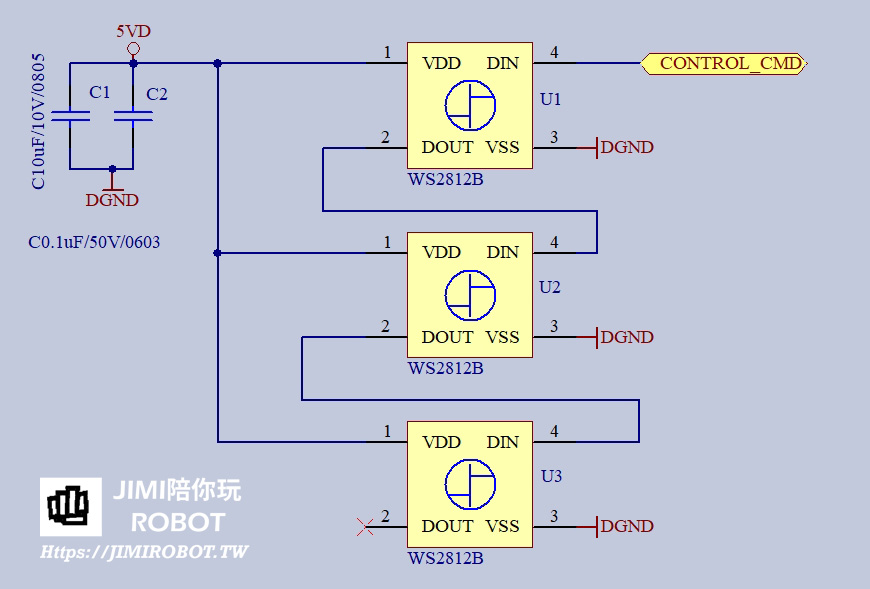
注意到了嗎? 從最上方的第1顆 LED (U1)開始,DIN 接收我們控制器傳給 2812 的數據命令, DOUT 就連接到第 2 顆 LED(U2)的 DIN 腳位,以此類推,第 2 顆的 DOUT 就連接到第 3 顆的 DIN,串接越多顆,也僅是 DOUT->DIN 連接越多次,如此一來,明顯地減少佈線的複雜度。至於 DOUT 腳位是什麼功能呢?為什麼只要將 DOUT 連到下一顆 LED DIN,就可以不用為每個 LED 連接控制線?JIMI哥 用白話一點的方式解釋:當DIN 收到指令後,內部的邏輯處理會將屬於自己的指令留下,DOUT 就會『PASS』 剩下指令出去,這就是為什麼只要把 DOUT 接到下一個 DIN,就可以進行資料傳輸的原因 。
這樣的連接架構解決了多顆 LED 佈線的問題,有沒有缺點? 當然有~當你用一顆傳一顆的傳送架構的來傳遞數據時,最大的問題就是 Delay,少顆的 LED 延遲效應不明顯,當到了 100 顆呢?或許就會有一點點的時間差,這對於在一些特別講究時間差的應用上(如視覺暫留 POV),就可能需要計算調整相關的參數。
另一個需要知道的細節就是電源的供應電流,JIMI哥查了一下 2812 的官網資料(www.worldsemi.com),此顆LED 在運作時的功率可以達到 0.24W,單顆 LED 消耗電流可以到 48mA(0.24w/5v),假設簡化成 50mA,當使用 LED 燈條時,各位朋友可以試著去計算燈條上的 LED 數量,也就是要使用功率多大的 5V 電源,燈條上有10顆,就記得選用0.05A*10=0.5A,同時加上一顆 100uF-470uF 大電容到 5V,讓 LED 控制時可以電源波動可以更小,盡量不要無腦直接去使用 ESP32S 5v 電源,因為電腦的 USB port 標準通常是只有 0.5A 電流供應,注意這些細節就可以避免系統異常狀況發生。
2. neopixel 類別
micropython 已經內建 neopixel 的模組可以直接使用,所以直接 import 匯入使用,下面為操作範例:
import machine, neopixel np = neopixel.NeoPixel(machine.Pin(14), 2) #指定GPIO14為數據輸出腳位,neopixel有兩顆LED np[0]=(255,255,100) #第1顆LED燈的顏色 np[1]=(100,100,100) #第2顆LED燈的顏色 np.write() #啟動傳輸並點亮LED
因為 neopixel 是利用實體的 GPIO 腳位來進行資料傳輸,所以這邊要匯入 machine 和 neopixel 兩個模組。再來就是建立起 neopixel 的物件, neopixel.NeoPixel(machine.Pin(14), 2) 這個方法的第一個參數為指定的 GPIO 物件,範例是使用 GPIO14,第2個參數是指這個 neopixel 燈條有幾顆 RGB LED,也就上面放了幾顆的 WS2812B。第3-4行就是指定 RGB LED 的顏色,np[0] 是指定第 1 顆 LED,np[1] 也就是第 2 顆,顏色的表示法是 RGB 色碼,刮號內的數值分別代表R、G、B 數值。 第 5 行為將這些參數寫入 neopixel 的模組內,同時啟動點亮。
3. NeoPixel 跑馬燈
– 電路連接
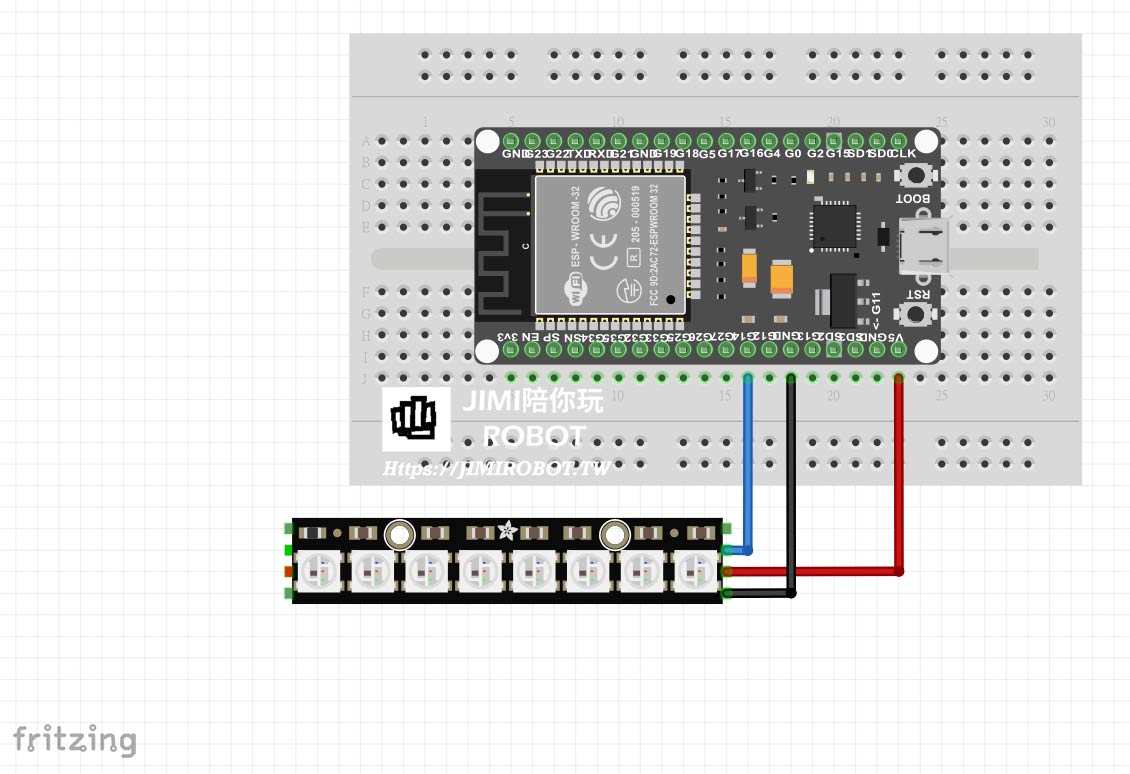
由於 NeoPixel 燈條通常已經把內部需要的線路都設計完成,各位朋友只要確認燈條的功率與電壓後,將 DIN、5V、 GND 連接至 ESP32 對應的腳位連接即可。(此處的 DIN 連接到 ESP32 GPIO14)
(不知道要選那支腳位做為資料傳輸的話,可以參考這篇 :EPS32 IO 基本知識 )
– 完整程式碼
JIMI哥 這邊用 micropython 官方說明文件的跑馬燈程式加個 RGB 變化做簡單示範。
import machine,neopixel,utime
np = neopixel.NeoPixel(machine.Pin(14), 8)
try:
while 1:
for i in range(16*3):
if (i//16)==0:
l=64;m=0;n=0
elif (i//16)==1:
l=0;m=64;n=0
elif (i/16)==2 :
l=0;m=0;n=64
for j in range(8):
np[j] = (l,m,n)
if (i // 8) % 2 == 0:
np[i % 8] = (0, 0, 0)
else:
np[8 - 1 - (i % 8)] = (0, 0, 0)
np.write()
utime.sleep_ms(100)
except:
for i in range(8):
np[i] = (0, 0, 0)
np.write()
– 程式說明
import machine,neopixel,utime np = neopixel.NeoPixel(machine.Pin(14), 8)
這邊建立起 neopixel 的物件,並指定 ESP32 的 GPIO14 作為資料傳輸,設定 neopixel 的 LED 顆數有 8 顆。
try:
while 1:
for i in range(16*3):
if (i//16)==0:
l=64;m=0;n=0 #set led to red
elif (i//16)==1:
l=0;m=64;n=0 #set led to green
elif (i/16)==2 :
l=0;m=0;n=64 #set led to blue
for j in range(8):
np[j] = (l,m,n)
np[]=(64,0,0),當程序處於16-31編號時,LED則為綠色 np=(0,64,0)
if (i // 8) % 2 == 0:
np[i % 8] = (0, 0, 0)
else:
np[8 - 1 - (i % 8)] = (0, 0, 0)
np.write()
utime.sleep_ms(100)
這段程式碼決定在每次迴圈時,LED 燈滅的位置,各位朋友可以簡單帶入迴圈的數字,即可以得知每次燈滅的位置在哪。utime.sleep_ms() 為每次迴圈 delay 的時間,數字大小也決定跑馬燈的來回速度。
except:
for i in range(8):
np[i] = (0, 0, 0)
np.write()
最後利用 except 語法,當系統中斷時,關閉所有 neopixel 的 LED 燈。
4. 總結
neopixel 是相當常見的 RGB LED 燈條,配合 micropython 內建的函示庫,可以很快在 ESP32 實現想要的燈光效果,如呼吸燈、色域變化等,且 python 語法另一個好處就是網路上都可以找到好用的 Library 可以參考,所以像是 HSV 轉 RGB 或呼吸函數等等,就可以不用自己改寫,縮短開發時間,各位如果有時間的話,可以自己在動手試試看~
↓↓↓↓↓↓賣場連結↓↓↓↓↓↓
歡迎大家有需要的話,可以多多支持一下我們的蝦皮賣場喔! 😀
吉米家官方店-創客機器人材料專賣 https://shopee.tw/jimirobot.tw
Follow JIMI哥 Twitter : https://twitter.com/jimirobot <–得到最新文章通知